

| Parameter | Value |
|---|---|
| Scanning range Y-axis (mm) | 400 |
| Scanning range Z-axis (mm) | 300 |
| Scanning range X (start of measurement, Z-axis) (mm) | 130 |
| Scanning range X (end of measurement, Z-axis) (mm) | 240 |
| Measurement accuracy, X, Z axes, (um) | ±150 |
| Measurement accuracy, Y axis, (um) | ±20 |
| Sampling rate, profiles/s | 250 |
| Speed (mm/s) | 25 |
| Parameters under control | length, width, height |
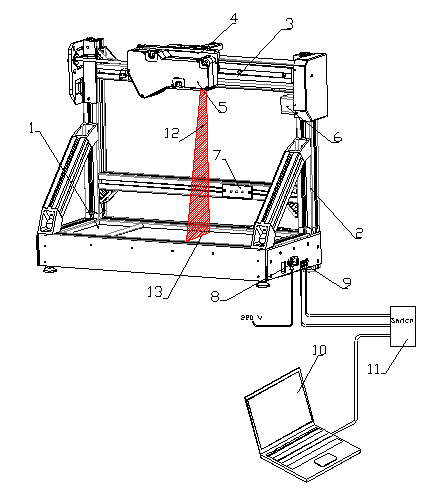
| Dimension (mm) | 730x415x180 |
| Weight (kg) | 40 |
| Power Supply |
Alternating-current mains with sampling rate (50 ±
1)Hz, norminal power 220 with allowable stress ±10% |
| Power Consumption (W) | 50 |
| Environment Conditions |
Environment temperature: +1...+35°С Relative humidity 25...65% |